|
(19th April 2016)
|
|
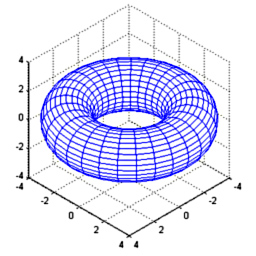
There are many games with a strong emphasis on gravity, and at times even multi-body trajectory simulations. However they all seem to be based on spherical geometry (as planets are shaped by gravity), but other shapes should create interesting trajectories. As torus has rotational symmetry its gravity field can be modelled on a 2D cross-section. In this project torus' field is estimated in 3D, projected to 2D and interpolation functions are fitted. The space- and time-efficient model could be used in a game to do physics simulation in real time.
|
|
|
(12th October 2014)
|
|
I wanted to find or create a formula which would accept an epoch timestamp, latitude and longitude and it would produce the Sun's observed azimuth and altitude in radians. It needs to take into account details earth's axial tilt and its position on its orbit around the sun. To my surprise I wasn't able to find such formula, so I had to develop it from scratch. Luckily earth's orbit (and orbits in general) is a well studied and documented problem, so I could take some shortcuts.
|
|
|
(10th September 2014)
|
|
Nowadays there are many HTML5-based map services, but typically they don't offer any export functionality. To create a full view of the desired region, one can either zoom out (and lose map details) or take many screenshots of different locations and manually stitch them together. This project can automatically load all stored screenshots, detect the map, crop relevant regions, determine images relative offsets and generate the high-res output with zero configuration from any map service.
|
|
|
(9th August 2014)
|
|
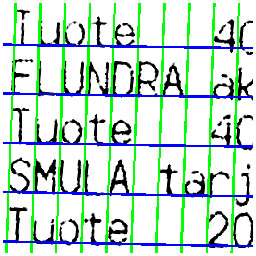
This project's goal was to automatically and robustly estimate and compensate distortion from any receipt photos. The user is able to just snap the photo and OCR could accurately identify bought products and their prices. However this task is somewhat challenging because typically receipts tend to get crumbled and bent. Thus they won't lie nicely flat on a surface for easy analysis. This set of algorithms solves that problem and produces distortion-free thresholded images for the next OCR step.
|
|
|
(7th June 2014)
|
|
From my office window I've got an unblocked size-view to the Ring Road I (Kehä I) in Espoo, Finland. It is one of the busiest roads in Finland, having up-to 100.000 cars / day. I wanted to create a program which would receive a video feed from a webcam and would process images in real time on common hardware.
|
|
|
(7th July 2013)
|
|
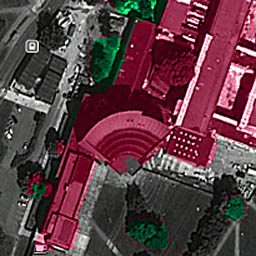
During the summer of 2012 when I was mainly working on my Master's Thesis, I also had a look at National Land Survey of Finland's open data download service. There I downloaded a point cloud dataset which had typically 4 - 5 measured points / square meter. This means that to visualize a region of 2.5 × 2 km, I had to work with a point cloud consisting of 5 × 2500 × 2000 → 25 million points. I chose to concentrate on my campus area, because I know it well and it has many interesting landmarks. For example the iconic main building can be seen in Figure 1.
|
|
|
(7th July 2013)
|
|
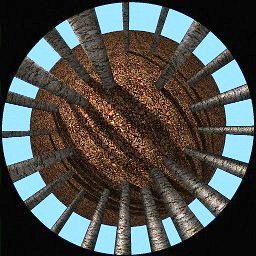
As I mentioned in the previous article about omnidirectional cameras, my Masters of Science Thesis involved the usage of this special kind of imaging system which consists of a traditional camera lens and a concave mirror, which provided 360° × 90° Field of View. It was ordered from Japan and there was some delay in the delivery, so meanwhile I wrote an all-Matlab script to simulate this system's properties, calibration and panorama generation in practice.
|
|
|
(6th July 2013)
|
|
My Masters of Science Thesis involved the usage of a so-called "omnidirectional camera". There are various ways of achieving 180° or even 360° view, with their distinct pros and cons. The general benefit of these alternative camera systems is that objects don't need to be tracked, because generally they stay withing the extremely broad Field of View (FoV) of the camera. This is also very beneficial in visual odometry tasks, because landmarks can be tracked for longer periods of time.
|
|
|
(26th June 2013)
|
|
I developed a coin recognition system which can recognize eight different groups of coins. The used set is all five coins of Singapore, but a few categories cannot be distinguished from each other without knowledge of the coin's size in relation to others.
|
|
|
(25th June 2013)
|
|
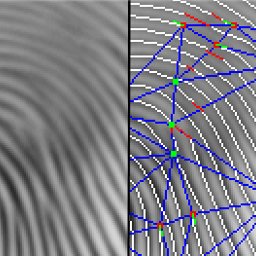
For my Bachelor of Science degree I developed a novel fingerprint matching algorithm, which ended up beating many alternative methods which were developed by research groups around the world. The used dataset the same which was used for FVC 2000 (Fingerprint Verification Competition).
|
|