|
(2nd November 2015)
|
|
This is an alternative answer to the question I encountered at Stack Overflow about fuzzy searching of hashes on Elasticsearch. My original answer used locality-sensitive hashing. Superior speed and simple implementation were gained by using nVidia's CUDA via Thrust library.
|
|
|
(1st December 2013)
|
|
Traditional databases such as MySQL are not designed to perform well in analytical queries, which requires access to possibly all of the rows on selected columns. This results in a full table scan and it cannot benefit from any indexes. Column-oriented engines try to circumvent this issue, but I went one step deeper and made the storage column value oriented, similar to an inverted index. This results in 2 — 10× speedup from optimized columnar solutions and 80× the speed of MySQL.
|
|
|
(10th November 2013)
|
|
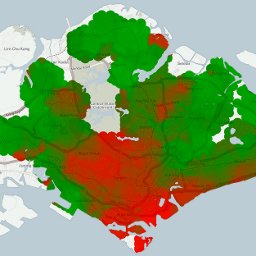
I wanted a real-time map generator to visualize regional property price changes based on chosen time interval. I didn't want to resort to pre-generated tiles, because this would prevent user-customized output and limit configuration options. To get the best performance, I implemented a FastCGI process in C++ with a RESTful interface to generate the required tiles in parallel. The resulting program can generate a customized 1280 × 720 resolution JPG in 30 milliseconds and equivalent PNG in 60 milliseconds.
|
|
|
(3rd November 2013)
|
|
When developing RESTful APIs, it is important to know how many requests per minute the end point is able to serve. Because of my interest in Nginx, FastCGI and multi-threaded C+++, I decided to develop my own in-broser HTTP load tester which supports easy configuration, any number of parallel load-generating worker threads and real-time graphing based on jQuery powered HighCharts library.
|
|
|
(15th July 2013)
|
|
As mentioned in an other article about omnidirectional cameras, my Master's Thesis' main topic was real-time interest point extraction and tracking on an omnidirectional image in a challenging forest environment. I found OpenCV's routines mostly rather slow and running in a single thread, so I ended up implementing everything myself to gain more control on the data flow and threads' dependencies. The implemented code would simultaneously use 4 threads on CPU and a few hundred on the GPU, executing interest point extraction and matching at 27 fps (37 ms/frame) for 1800 × 360 pixels (≈0.65 Mpix) panoramic image.
|
|
|
(13th July 2013)
|
|
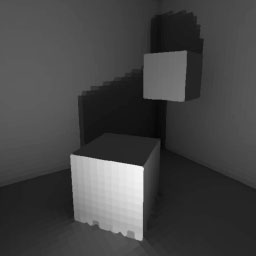
I implemented a simple global illumination algorithm, which constructs and solves the sparse matrix which describes how much tiles reflect light to each other. It supported only gray-scale rendering and wouldn't scale up to bigger scenes, but it was nevertheless an interesting project and I learnt a lot about 3D geometry, linear algebra and computer graphics. Graphics was drawn by a software renderer which uses only standard SDL primitive draw calls.
|
|
|
(13th July 2013)
|
|
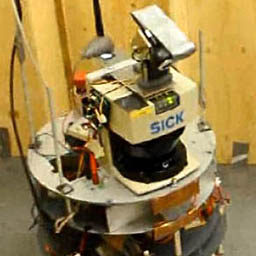
At spring 2012 I did a course in robotics, which involved programming a semi-automatic robot which could fetch items from pre-determined locations and return them back to correct deposit bins. I had a team of four people, and I solved the problems of continuous robust robot localization, task planning and path planning. Others focused on the overall source code architecture, state-machine logic, closed loop driving control and other general topics. The used robot can be seen in Figure 1.
|
|
|
(9th July 2013)
|
|
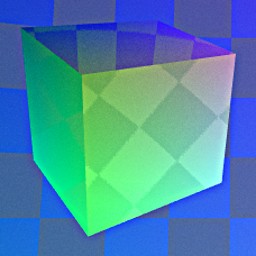
So far I've written a basic rendering engine which uses Nvidia's CUDA (Compute Unified Device Architecture) which can render reflective surfaces with environmental mapping and anti-aliasing and motion blur at 200 fps with minimal usage of 3rd party libraries such as OpenGL. This let me fully implement the cross-platform rendering pipeline from data transfer to pixel-level RGB calculations, all in C-like syntax.
|
|
|
(7th July 2013)
|
|
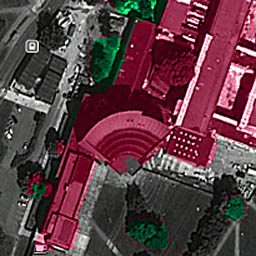
During the summer of 2012 when I was mainly working on my Master's Thesis, I also had a look at National Land Survey of Finland's open data download service. There I downloaded a point cloud dataset which had typically 4 - 5 measured points / square meter. This means that to visualize a region of 2.5 × 2 km, I had to work with a point cloud consisting of 5 × 2500 × 2000 → 25 million points. I chose to concentrate on my campus area, because I know it well and it has many interesting landmarks. For example the iconic main building can be seen in Figure 1.
|
|
|
(6th July 2013)
|
|
My Masters of Science Thesis involved the usage of a so-called "omnidirectional camera". There are various ways of achieving 180° or even 360° view, with their distinct pros and cons. The general benefit of these alternative camera systems is that objects don't need to be tracked, because generally they stay withing the extremely broad Field of View (FoV) of the camera. This is also very beneficial in visual odometry tasks, because landmarks can be tracked for longer periods of time.
|
|
|
(25th June 2013)
|
|
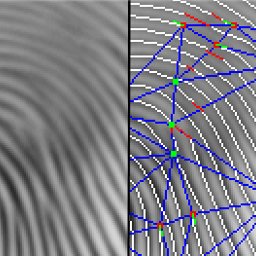
For my Bachelor of Science degree I developed a novel fingerprint matching algorithm, which ended up beating many alternative methods which were developed by research groups around the world. The used dataset the same which was used for FVC 2000 (Fingerprint Verification Competition).
|
|