
Field Of View at other sites
Real-time interest point tracking(15th July 2013) |
|||||
|
As mentioned in an other article about omnidirectional cameras, my Master's Thesis' main topic was real-time interest point extraction and tracking on an omnidirectional image in a challenging forest environment. I found OpenCV's routines mostly rather slow and running in a single thread, so I ended up implementing everything myself to gain more control on the data flow and threads' dependencies. The implemented code would simultaneously use 4 threads on CPU and a few hundred on the GPU, executing interest point extraction and matching at 27 fps (37 ms/frame) for 1800 × 360 pixels (≈0.65 Mpix) panoramic image.
|
|
||||
Rendering omnidirectional images(7th July 2013) |
|||||
|
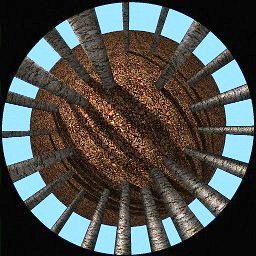
As I mentioned in the previous article about omnidirectional cameras, my Masters of Science Thesis involved the usage of this special kind of imaging system which consists of a traditional camera lens and a concave mirror, which provided 360° × 90° Field of View. It was ordered from Japan and there was some delay in the delivery, so meanwhile I wrote an all-Matlab script to simulate this system's properties, calibration and panorama generation in practice.
|
|
||||
Omnidirectional cameras(6th July 2013) |
|||||
|
My Masters of Science Thesis involved the usage of a so-called "omnidirectional camera". There are various ways of achieving 180° or even 360° view, with their distinct pros and cons. The general benefit of these alternative camera systems is that objects don't need to be tracked, because generally they stay withing the extremely broad Field of View (FoV) of the camera. This is also very beneficial in visual odometry tasks, because landmarks can be tracked for longer periods of time.
|

|
||||
Home
|

Navigation
| Home | (Home page) |
| About | (About me) |
| Platform | (About this blog) |
External
| (Niko Nyrhilä) | |
| GitHub | (nikonyrh) |
| Stackoverflow | (nikonyrh) |
Most recent
| Bruteforcing Countdown numbe... | (2023 Apr) |
| Cheating at Bananagrams with... | (2023 Apr) |
| Introduction to Stable Diffu... | (2022 Nov) |
| Matching puzzle pieces together | (2022 Jul) |
| Single channel speech / musi... | (2022 Feb) |
Most frequent tags
| Computer Vision | (13) |
| GitHub | (12) |
| Databases | (9) |
| Elasticsearch | (6) |
| FFT | (5) |
| Rendering | (5) |
| Applied mathematics | (4) |
Most frequent languages
| Python | (13) |
| C++ | (11) |
| Matlab | (10) |
| Keras | (6) |
| Clojure | (6) |
| Bash | (6) |
| PHP | (6) |
Co-occurrence matrix
| Matl | Pyth | C++ | Cloj | Bash | Kera | |
| Comput | 6 | 6 | 3 | 1 | 0 | 5 |
| GitHub | 0 | 2 | 1 | 4 | 3 | 0 |
| Databa | 0 | 3 | 2 | 2 | 1 | 0 |
| Render | 3 | 0 | 3 | 0 | 0 | 0 |
| Nginx | 0 | 1 | 0 | 0 | 4 | 0 |
| Autoen | 0 | 3 | 0 | 1 | 0 | 2 |
| Elasti | 0 | 2 | 0 | 3 | 0 | 0 |
| FFT | 3 | 1 | 1 | 0 | 0 | 1 |
| Data S | 2 | 1 | 2 | 1 | 0 | 1 |
| JVM | 0 | 1 | 0 | 3 | 1 | 0 |
| Docker | 0 | 1 | 0 | 0 | 3 | 0 |
| FastCG | 0 | 0 | 3 | 0 | 0 | 0 |
| Applie | 2 | 2 | 0 | 0 | 0 | 0 |
| Field | 2 | 0 | 2 | 0 | 0 | 0 |
| Omnidi | 2 | 0 | 2 | 0 | 0 | 0 |
| Affine | 2 | 0 | 2 | 0 | 0 | 0 |
| Master | 1 | 0 | 2 | 0 | 0 | 0 |
| Archit | 0 | 1 | 0 | 0 | 2 | 0 |
| Visual | 1 | 0 | 2 | 0 | 0 | 0 |
| Spark | 0 | 1 | 0 | 0 | 2 | 0 |
| Blog | 0 | 0 | 0 | 2 | 0 | 0 |
| Hyphen | 0 | 0 | 0 | 2 | 0 | 0 |
| Stack | 0 | 1 | 1 | 0 | 0 | 0 |
| SQL | 0 | 0 | 1 | 1 | 0 | 0 |
| Busine | 0 | 1 | 0 | 1 | 0 | 0 |
| Signal | 0 | 1 | 0 | 0 | 0 | 1 |
| Encryp | 0 | 0 | 0 | 0 | 1 | 0 |
| Git | 0 | 0 | 0 | 1 | 0 | 0 |
| Stable | 0 | 1 | 0 | 0 | 0 | 0 |
| Redis | 0 | 1 | 0 | 0 | 0 | 0 |
| Thrust | 0 | 0 | 1 | 0 | 0 | 0 |
| Kibana | 0 | 0 | 0 | 1 | 0 | 0 |
| Astron | 1 | 0 | 0 | 0 | 0 | 0 |
| Mustac | 0 | 0 | 1 | 0 | 0 | 0 |
| NAT | 0 | 0 | 0 | 0 | 1 | 0 |
| jQuery | 0 | 0 | 1 | 0 | 0 | 0 |
| SSH | 0 | 0 | 0 | 0 | 1 | 0 |
| Happyh | 0 | 0 | 1 | 0 | 0 | 0 |
| Backup | 0 | 0 | 0 | 0 | 1 | 0 |
| Pthrea | 0 | 0 | 1 | 0 | 0 | 0 |
| AWS | 0 | 0 | 0 | 0 | 1 | 0 |
| SIFT | 0 | 0 | 1 | 0 | 0 | 0 |
| SURF | 0 | 0 | 1 | 0 | 0 | 0 |
| Conjug | 0 | 0 | 1 | 0 | 0 | 0 |
| Kalman | 0 | 0 | 1 | 0 | 0 | 0 |
| Partic | 0 | 0 | 1 | 0 | 0 | 0 |
| Gradie | 0 | 0 | 1 | 0 | 0 | 0 |
| Simult | 0 | 0 | 1 | 0 | 0 | 0 |
| Roboti | 0 | 0 | 1 | 0 | 0 | 0 |
| Princi | 1 | 0 | 0 | 0 | 0 | 0 |
| Receiv | 1 | 0 | 0 | 0 | 0 | 0 |
| Linear | 1 | 0 | 0 | 0 | 0 | 0 |
| Suppor | 1 | 0 | 0 | 0 | 0 | 0 |
| Machin | 1 | 0 | 0 | 0 | 0 | 0 |
| Discre | 1 | 0 | 0 | 0 | 0 | 0 |
