
Rendering at other sites
Automatic map stitching(10th September 2014) |
|||||
|
Nowadays there are many HTML5-based map services, but typically they don't offer any export functionality. To create a full view of the desired region, one can either zoom out (and lose map details) or take many screenshots of different locations and manually stitch them together. This project can automatically load all stored screenshots, detect the map, crop relevant regions, determine images relative offsets and generate the high-res output with zero configuration from any map service.
|

|
||||
Global illumination(13th July 2013) |
|||||
|
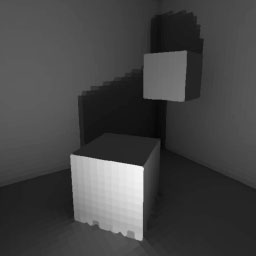
I implemented a simple global illumination algorithm, which constructs and solves the sparse matrix which describes how much tiles reflect light to each other. It supported only gray-scale rendering and wouldn't scale up to bigger scenes, but it was nevertheless an interesting project and I learnt a lot about 3D geometry, linear algebra and computer graphics. Graphics was drawn by a software renderer which uses only standard SDL primitive draw calls.
|
|
||||
CUDA realtime rendering engine(9th July 2013) |
|||||
|
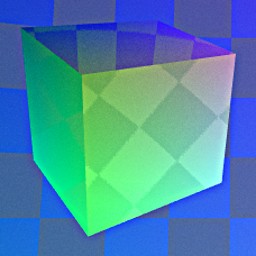
So far I've written a basic rendering engine which uses Nvidia's CUDA (Compute Unified Device Architecture) which can render reflective surfaces with environmental mapping and anti-aliasing and motion blur at 200 fps with minimal usage of 3rd party libraries such as OpenGL. This let me fully implement the cross-platform rendering pipeline from data transfer to pixel-level RGB calculations, all in C-like syntax.
|
|
||||
Visualizing laser scanned geography(7th July 2013) |
|||||
|
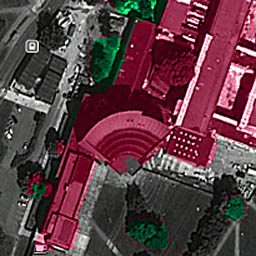
During the summer of 2012 when I was mainly working on my Master's Thesis, I also had a look at National Land Survey of Finland's open data download service. There I downloaded a point cloud dataset which had typically 4 - 5 measured points / square meter. This means that to visualize a region of 2.5 × 2 km, I had to work with a point cloud consisting of 5 × 2500 × 2000 → 25 million points. I chose to concentrate on my campus area, because I know it well and it has many interesting landmarks. For example the iconic main building can be seen in Figure 1.
|
|
||||
Rendering omnidirectional images(7th July 2013) |
|||||
|
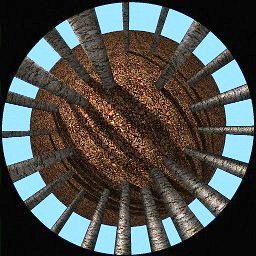
As I mentioned in the previous article about omnidirectional cameras, my Masters of Science Thesis involved the usage of this special kind of imaging system which consists of a traditional camera lens and a concave mirror, which provided 360° × 90° Field of View. It was ordered from Japan and there was some delay in the delivery, so meanwhile I wrote an all-Matlab script to simulate this system's properties, calibration and panorama generation in practice.
|
|
||||
Home
|

Navigation
| Home | (Home page) |
| About | (About me) |
| Platform | (About this blog) |
External
| (Niko Nyrhilä) | |
| GitHub | (nikonyrh) |
| Stackoverflow | (nikonyrh) |
Most recent
| Bruteforcing Countdown numbe... | (2023 Apr) |
| Cheating at Bananagrams with... | (2023 Apr) |
| Introduction to Stable Diffu... | (2022 Nov) |
| Matching puzzle pieces together | (2022 Jul) |
| Single channel speech / musi... | (2022 Feb) |
Most frequent tags
| Computer Vision | (13) |
| GitHub | (12) |
| Databases | (9) |
| Elasticsearch | (6) |
| FFT | (5) |
| Rendering | (5) |
| Applied mathematics | (4) |
Most frequent languages
| Python | (13) |
| C++ | (11) |
| Matlab | (10) |
| Keras | (6) |
| Clojure | (6) |
| Bash | (6) |
| PHP | (6) |
Co-occurrence matrix
| Matl | Pyth | C++ | Cloj | Bash | Kera | |
| Comput | 6 | 6 | 3 | 1 | 0 | 5 |
| GitHub | 0 | 2 | 1 | 4 | 3 | 0 |
| Databa | 0 | 3 | 2 | 2 | 1 | 0 |
| Render | 3 | 0 | 3 | 0 | 0 | 0 |
| Nginx | 0 | 1 | 0 | 0 | 4 | 0 |
| Autoen | 0 | 3 | 0 | 1 | 0 | 2 |
| Elasti | 0 | 2 | 0 | 3 | 0 | 0 |
| FFT | 3 | 1 | 1 | 0 | 0 | 1 |
| Data S | 2 | 1 | 2 | 1 | 0 | 1 |
| JVM | 0 | 1 | 0 | 3 | 1 | 0 |
| Docker | 0 | 1 | 0 | 0 | 3 | 0 |
| FastCG | 0 | 0 | 3 | 0 | 0 | 0 |
| Applie | 2 | 2 | 0 | 0 | 0 | 0 |
| Field | 2 | 0 | 2 | 0 | 0 | 0 |
| Omnidi | 2 | 0 | 2 | 0 | 0 | 0 |
| Affine | 2 | 0 | 2 | 0 | 0 | 0 |
| Master | 1 | 0 | 2 | 0 | 0 | 0 |
| Archit | 0 | 1 | 0 | 0 | 2 | 0 |
| Visual | 1 | 0 | 2 | 0 | 0 | 0 |
| Spark | 0 | 1 | 0 | 0 | 2 | 0 |
| Blog | 0 | 0 | 0 | 2 | 0 | 0 |
| Hyphen | 0 | 0 | 0 | 2 | 0 | 0 |
| Stack | 0 | 1 | 1 | 0 | 0 | 0 |
| SQL | 0 | 0 | 1 | 1 | 0 | 0 |
| Busine | 0 | 1 | 0 | 1 | 0 | 0 |
| Signal | 0 | 1 | 0 | 0 | 0 | 1 |
| Encryp | 0 | 0 | 0 | 0 | 1 | 0 |
| Git | 0 | 0 | 0 | 1 | 0 | 0 |
| Stable | 0 | 1 | 0 | 0 | 0 | 0 |
| Redis | 0 | 1 | 0 | 0 | 0 | 0 |
| Thrust | 0 | 0 | 1 | 0 | 0 | 0 |
| Kibana | 0 | 0 | 0 | 1 | 0 | 0 |
| Astron | 1 | 0 | 0 | 0 | 0 | 0 |
| Mustac | 0 | 0 | 1 | 0 | 0 | 0 |
| NAT | 0 | 0 | 0 | 0 | 1 | 0 |
| jQuery | 0 | 0 | 1 | 0 | 0 | 0 |
| SSH | 0 | 0 | 0 | 0 | 1 | 0 |
| Happyh | 0 | 0 | 1 | 0 | 0 | 0 |
| Backup | 0 | 0 | 0 | 0 | 1 | 0 |
| Pthrea | 0 | 0 | 1 | 0 | 0 | 0 |
| AWS | 0 | 0 | 0 | 0 | 1 | 0 |
| SIFT | 0 | 0 | 1 | 0 | 0 | 0 |
| SURF | 0 | 0 | 1 | 0 | 0 | 0 |
| Conjug | 0 | 0 | 1 | 0 | 0 | 0 |
| Kalman | 0 | 0 | 1 | 0 | 0 | 0 |
| Partic | 0 | 0 | 1 | 0 | 0 | 0 |
| Gradie | 0 | 0 | 1 | 0 | 0 | 0 |
| Simult | 0 | 0 | 1 | 0 | 0 | 0 |
| Roboti | 0 | 0 | 1 | 0 | 0 | 0 |
| Princi | 1 | 0 | 0 | 0 | 0 | 0 |
| Receiv | 1 | 0 | 0 | 0 | 0 | 0 |
| Linear | 1 | 0 | 0 | 0 | 0 | 0 |
| Suppor | 1 | 0 | 0 | 0 | 0 | 0 |
| Machin | 1 | 0 | 0 | 0 | 0 | 0 |
| Discre | 1 | 0 | 0 | 0 | 0 | 0 |
